CFD & FSI-RG
Computational Fluid Dynamics &
Fluid Structure Interaction
Research Group
qing.xiao@strath.ac.uk +44 (0)141 548 4779
Computational Fluid Dynamics &
Fluid Structure Interaction
Research Group
qing.xiao@strath.ac.uk +44 (0)141 548 4779
A fluid-structure interaction study on a passively deformed fish fin
By Yang Luo, Dr Qing Xiao
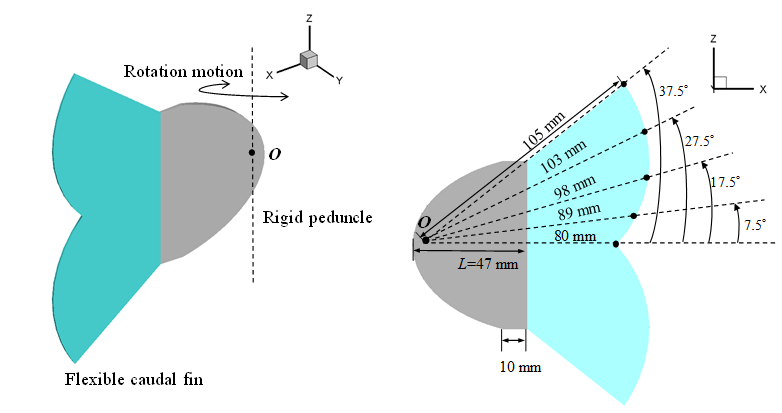
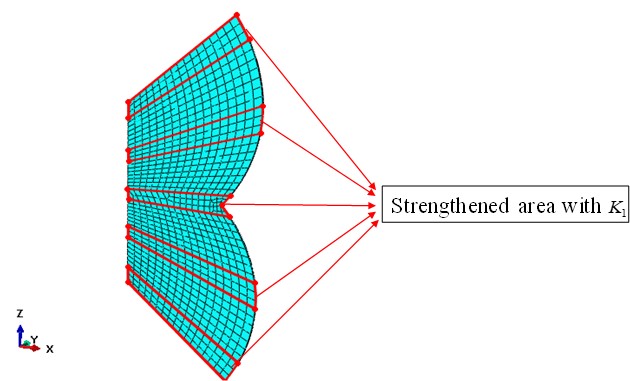
In this project, the propulsive performance of a caudal peduncle-fin swimmer mimicking a bio-inspired robotic fish model is numerically studied using a fully coupled FSI solver. The model consists of a rigid peduncle and a flexible fin which pitches in a uniform flow. The flexible fin is modelled as a thin plate assigned with non-uniformly distributed stiffness. A finite volume method based in-house Navier-Stokes solver is used to solve the fluid equations while the fin deformation is resolved using a finite element code. The effect of the fin flexibility on the propulsive performance is investigated.
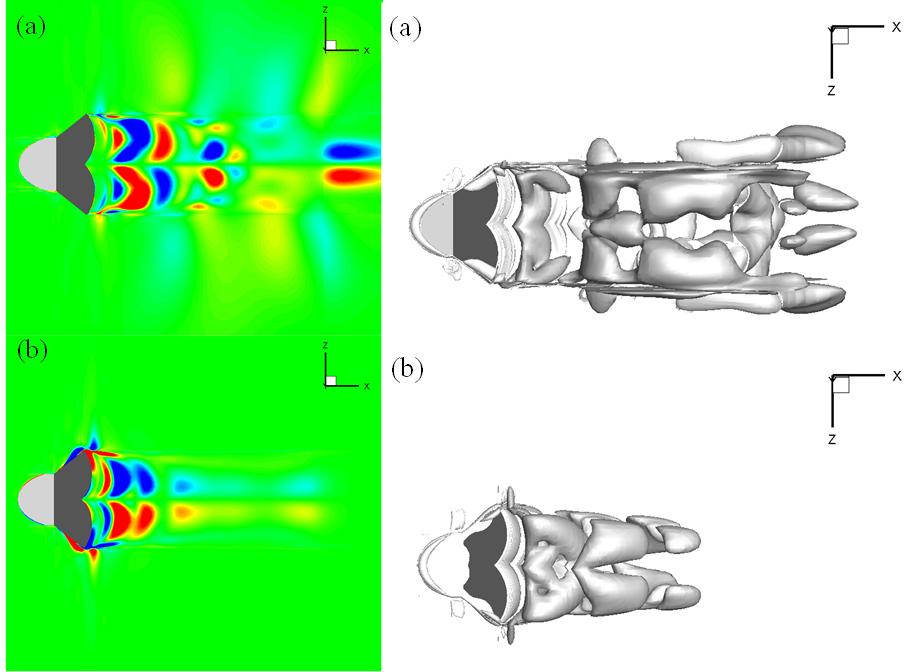
The numerical results indicate that compliance has a significant influence on propulsive performance. Under the parameters studied in this research, the medium flexible fin exhibits remarkable efficiency improvement, as well as the thrust augment, while the least flexible fin shows no obvious difference from the rigid one. However, for the most flexible fin, although the thrust production decreases sharply, the efficiency reaches the maximum value. Interestingly, by non-uniformly distributing the rigidity across the caudal fin, our model is able to replicate some fin deformation patterns observed in both the live fish and the experimental robotic fish.
Copyright © 2014 - All Rights Reserved - University of Strathclyde CFD & FSI-RG